今回もラズパイネタです。
これまで、ラズパイ上で何かを作るときはSSHで接続していたのですが、これだとネットワーク環境が必須になります。かといってHDMI出力を使うかと言えば、これはこれで別モニターを用意しなきゃいけないので面倒くさいです(´・ω・)
個人的にはネットワークも別モニターも不要な環境がベストなのですが、シリアル通信を使えばそれが実現できると知り、さっそくRaspberryPi3で試してみることにしました。
USB<->シリアル変換アダプタを購入
シリアル通信を使ってラズパイとお話しできるようにするには、PCのUSBポートとラズパイのシリアルポートを仲介してくれるアダプタが必要になります。
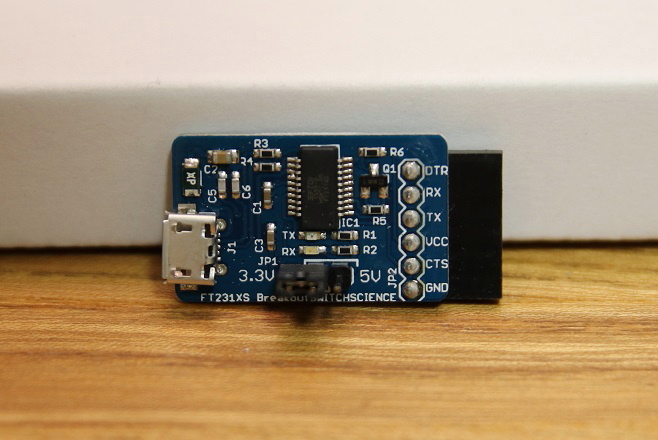
そこで、今回はスイッチサイエンスの「FTDI USBシリアル変換アダプター Rev.2」を使ってみることにしました。
ドライバをインストール
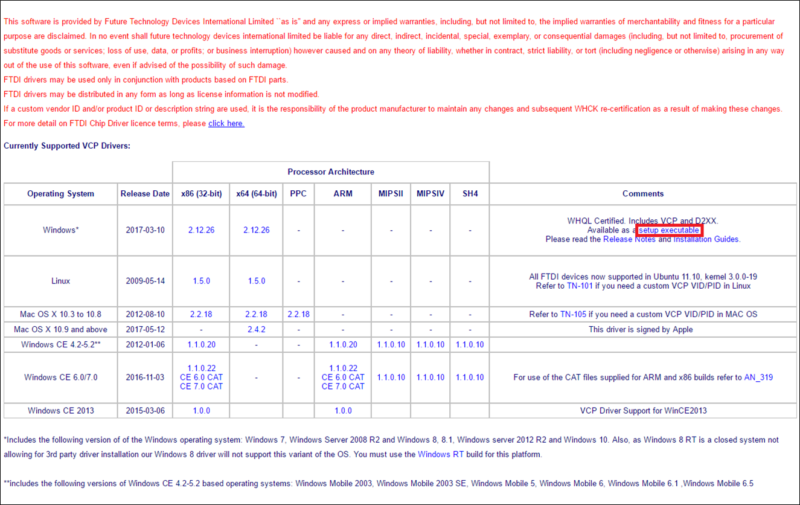
PCでアダプタを使う準備としてドライバのインストールが必要なので、ドライバのダウンロードページから環境に合ったモノをダウンロードします。ちなみに、今回はWindows環境として進めます。
ダウンロードできたら、Setup.exeを実行してドライバをインストールします。本来であれば、インストール後にデバイスマネージャーに「USB Serial Converter」が表示されるはずなのですが、私の環境ではそれが表示されませんでした。
原因は良く分かりませんが、ドライバ自体のインストールはできているので気にせず先に進みます。
ラズパイと結線する
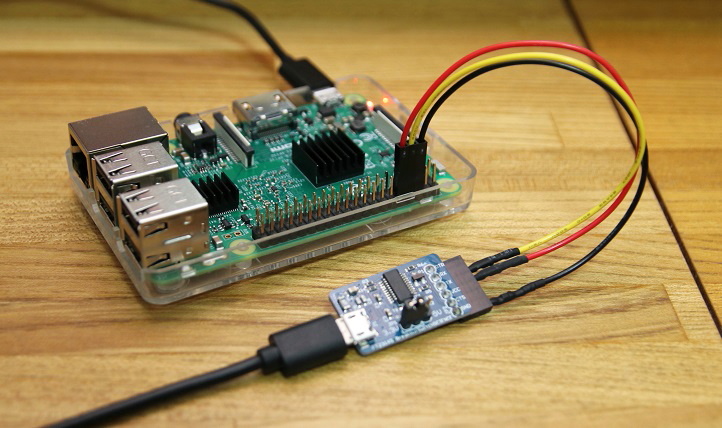
次にラズパイとアダプタを結線します。シリアル通信に必要な線はTX/RX/GNDの3本です。特にTXとRXはアダプタとラズパイの間でクロスするように接続します。
アダプタのGND <--> ラズパイのGND(Pin6)
アダプタのRX <--> ラズパイのTX(Pin8)
アダプタのTX <--> ラズパイのRX(Pin10)
結線した状態はこんな感じです。このとき、アダプタの電圧切替ジャンパを3.3V側に設定するのを忘れないように注意しましょう。間違えると最悪ラズパイが壊れます。
これでハード側の準備は完了です。ここからは実際にシリアル通信を試してみます。
ラズパイ側でシリアル通信を有効にする
シリアル通信を試す前に、以下の手順でラズパイ側のシリアル通信を有効にします。もしすでに有効になっていればこの手順は不要です。
- 「raspi-config」を実行
- 「5 Interfacing Options」を選択
- 「P6 Serial」を選択
- 「Would you like a login shel to be accesible over serial?」で「Yes」を選択
- 「Finish」を選択しラズパイを再起動
TeraTermで接続
ラズパイのシリアル通信を有効にできたら、TeraTermなどのクライアントでシリアル通信を開始します。このとき、ボーレートは115200に設定しておきます。
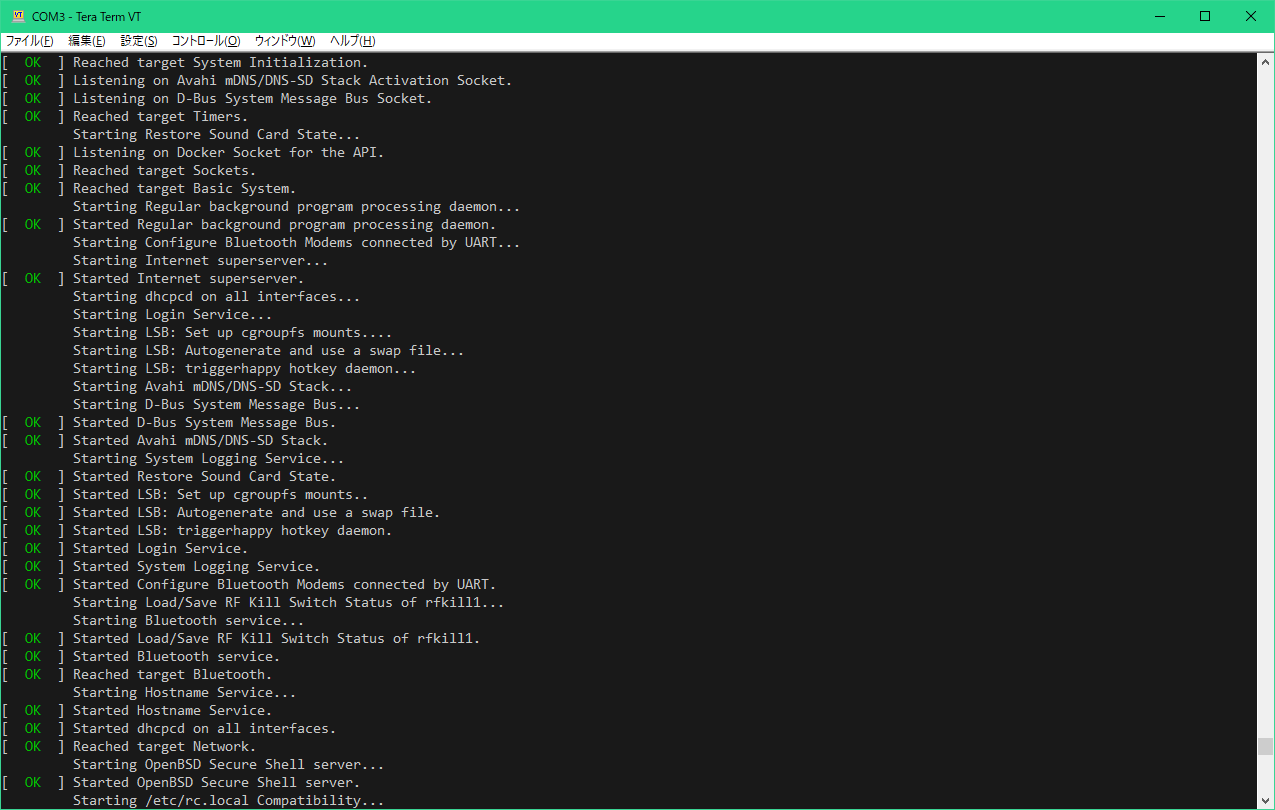
上手くいけば、このようにラズパイのコンソール出力がTeraTerm上に現れるようになります。あとはSSHでつないだときと同じようにコマンド実行や出力の確認ができます。
もちろん、ネットワーク環境も不要なので完全にクローズな環境でも開発ができるようになります。これは便利(・∀・)
ということで、無事にラズパイでシリアル通信を使えるようになりました。実はある別の目的もあってこの実験をしてみたのですが、それについてはまた別の記事にまとめたいと思います。
ではではノシ